美国国家航空航天局概述了在土星和木星的冰冷卫星上部署穴居“低温机器人”的计划

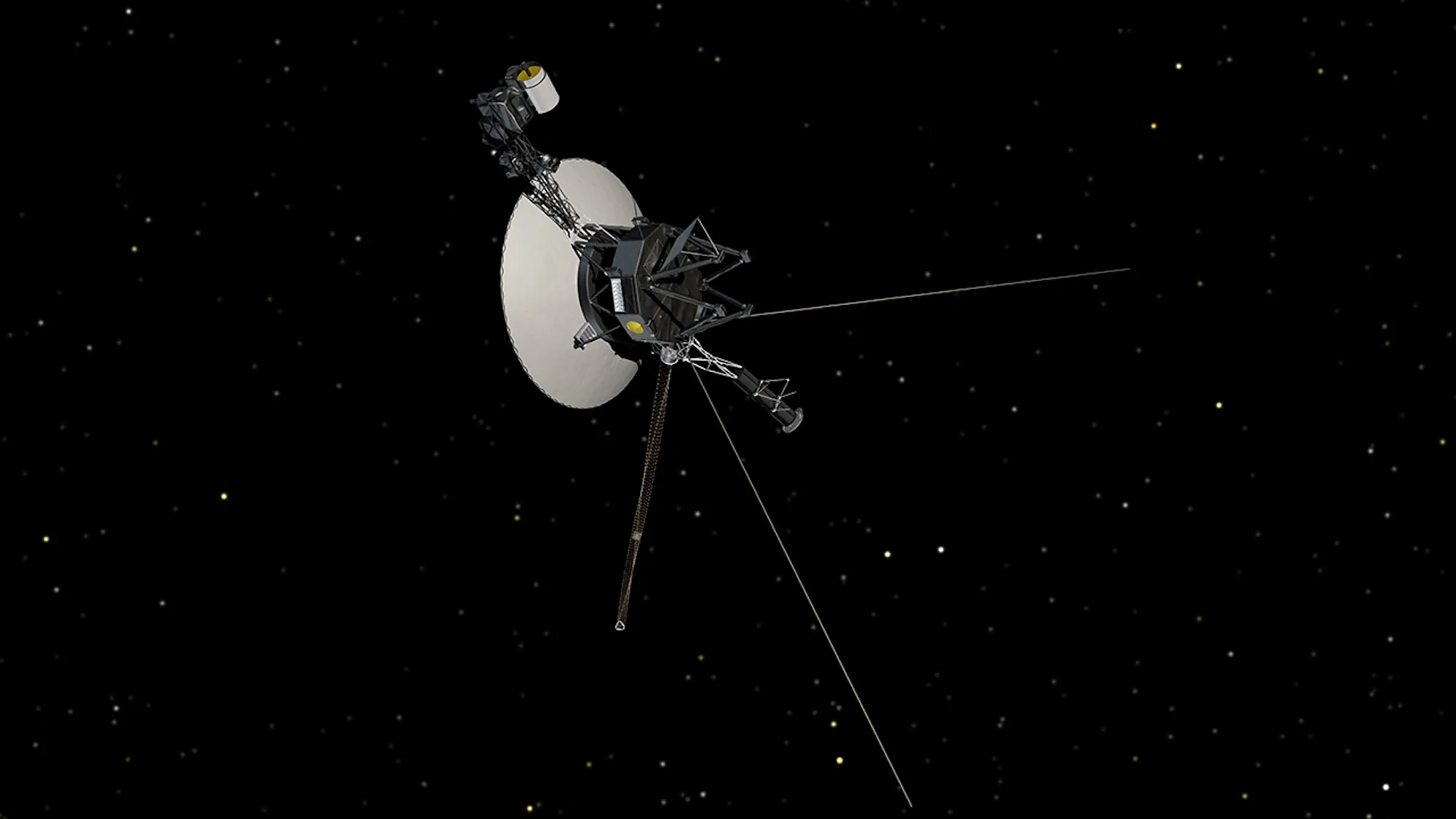
一幅插图显示了一个冷冻机器人在欧罗巴的海洋中游泳,寻找生命。(图片来源:美国国家航空航天局/JPL加州理工学院)
(蜘蛛网eeook.com)据美国太空网(罗伯特・李):美国国家航空航天局正在为机器人构建路线图,这些机器人可以通过未来的太空任务访问海洋世界,并打破世界厚厚的冰壳,探索地下海洋以寻找生命。
最近,航天局公布了2023年2月美国国家航空航天局主办的研讨会的结果,科学家和工程师聚集在一起讨论可能的“低温机器人”任务概念。这个想法是穿过太阳系卫星的冰冷外部,像木星的卫星欧罗巴或土星的卫星恩克拉多斯,并在其中放置一个探测器,可以探索下面的液态海洋。
探索的cryobot概念是简单地钻入一个世界的替代方案,涉及使用一个从冰冷海洋世界表面的母单元发出的圆柱形设备,该设备可以融化冰,因此随着水在周围流动并重新冻结而滑落。
这些探测器和这种所谓的“热钻探”技术目前通常用于调查地球上的冰川和冰盖,但像木卫二和土卫二这样的世界的冰壳更冷更厚。它们还表现出远不可预测的行为。
几年来,通过低温机器人将当前的地球热钻井作业应用到地外环境一直是美国国家航空航天局木卫二科学探索地下访问机制(SESAME)和海洋世界生命探测技术概念(COLDTech)项目支持的研究人员的重点。
然而,随着时间的推移,人类对冰盖海洋世界有了更多的了解,因此,在加州理工学院(Caltech)举行的研讨会为参与这些项目的科学家提供了一个机会,以重新召集并确保这些发展被纳入机器人任务架构。
寻找生命,跟着水走
正如我们所知,生命依赖于许多关键化合物、分子和元素,但可以说,没有一种像水一样至关重要。
作为地球上生命的基本构成,很容易理解为什么水成为科学家关注的焦点,他们希望在太阳系的其他地方寻找生命。此外,虽然我们已经发现在我们的恒星后院(甚至更远的地方)有丰富的水,但没有什么发现比认识到我们太阳系中的冰冷卫星拥有巨大的液态水海洋更让天体生物学家着迷了。
发现火星的干旱景观曾经充满了水,这无疑为发现古代生命的遗迹提供了令人兴奋的机会,但像木卫二和土卫二这样的海洋卫星提供了发现目前可居住的世界的机会,甚至可能现在就在它们的水域中拥有真正的生物。那些生物,尽管它们可能是微生物,却是革命性的发现。
根据美国国家航空航天局的说法,加州理工学院的研讨会确定了四个关键方面,这四个方面应该为开发外星水世界探索机器人的路线图提供信息。这些方面是功率、热容量、移动性和通信。
一个能在压力下加热的机器人
当然,我们海洋世界的几英里厚的冰壳对寻找生命的任务构成了相当大的挑战。这意味着探索cryobot的海洋世界的心脏需要一个能够提供热量的核能系统,可以融化那么多英里的冰――这个系统估计需要大约10千瓦(kW)的能量。这个系统还必须被整合到一个结构中,这个结构能够承受这些深海的巨大压力。
开发这样一个系统是有先例的,不管它听起来有多复杂..
卡西尼号飞船在2017年坠入这个气体巨人的大气层之前探索了土星及其卫星,它携带了一个能够产生14千瓦的热能系统,比融化数英里的冰所需的能量还要多。此外,在20世纪60年代和70年代,放射性同位素热电发电机(RTG)可能会在木卫二海洋的压力下幸存下来,并被部署到地球上的海洋底部。
但是未来的低温机器人不仅仅需要环境保护;还需要保护它免受自身产生的热量的影响。这将需要一个热管理系统,通过将热量分配到环境中来维持机器人的安全内部温度。
科学家说,做到这一点的一种方法是使用两个独立的液体泵送回路。其中一个将通过嵌入机器人皮肤的通道循环内部工作流体,另一个将在低温机器人和周围环境之间循环融化的冰水。
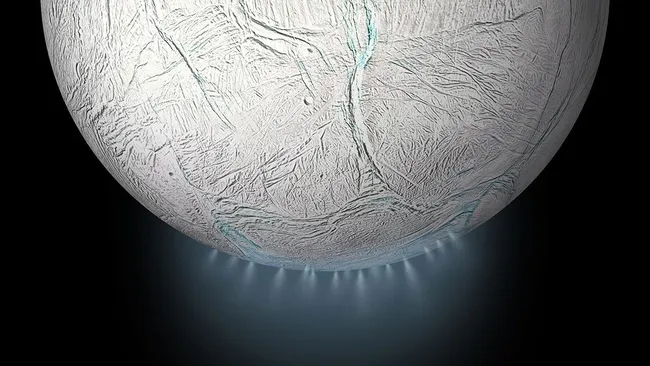
一幅插图显示了从土星的卫星恩克拉多斯喷出的冰羽。(图片鸣谢:美国国家航空航天局)
虽然像这样的系统已经制造出来了,但还需要更多的开发来为它们适应欧罗巴或土卫二的冰壳做准备。
这些冰壳可能还含有岩石和盐等杂质,机器人需要额外的系统才能穿透这些杂质。这可以通过机械切割、用高压水喷射这些杂质,甚至两者结合来实现。
当然,一些障碍,如大而坚硬的岩石、盐块、水洼,甚至这些冰壳中的巨大空隙,都可能无法通过这些方法清除――因此,低温机器人还需要能够导航到地下海洋。这将需要集成一个朝下的传感器来观察障碍物以及一个转向系统,这两个系统在过去已经开发出来,但尚未完全集成到地球上的任何工作系统中。
科学家们还必须在开发前往冰冷海洋卫星的任务之前,想办法更好地识别冰壳中的障碍,这是研讨会确定的优先事项。即将到来的欧罗巴快船任务将于2024年发射,并于2030年抵达冰冷的木卫二,这可能是这项危险调查工作的一部分。
打破僵局,但不是交流
最后但并非最不重要的是,在加州理工学院研讨会上讨论的另一个主要机器人任务是一个通信系统,该系统将允许重要数据从深潜、海洋探索探测器传送回位于目标海洋世界冰层顶部的母中枢单元。
在地球上,低温机器人使用光纤电缆来完成这项工作,但在外星世界的冰中部署这些设备需要确保冰不会破坏电缆。这在土卫二活跃的冰壳中尤其具有挑战性,当海洋物质通过裂缝喷发,喷入月球大气层时,冰壳可能会移动和移动。
约翰・霍普斯金应用物理实验室(JPL)的Kate Craft正在研究海洋卫星上的冰剪如何影响嵌入冰中的通信系链系统,而其他团队正在研究非物理的数据传输方法,例如使用无线电频率、声学甚至磁场将数据从海洋通过外星冰传输到表面。
虽然这是本次研讨会约40名与会者讨论的海洋世界探索低温机器人的四个关键要素,但也考虑了其他因素,如可以对收集的液体进行采样和分析的仪器,保护表面模块的冰锚系统,以及覆盖低温机器人表面的材料,这些材料在外星环境中不会腐蚀。
任务规划工作的总体结果是,有大量的工作要做,但对冰冷的太阳系世界的低温机器人任务是可行的。
这最终意味着在其他星球上寻找生命比以往任何时候都更有可能。