ͬ����VLBI�����ɹ������϶�����������������˶�

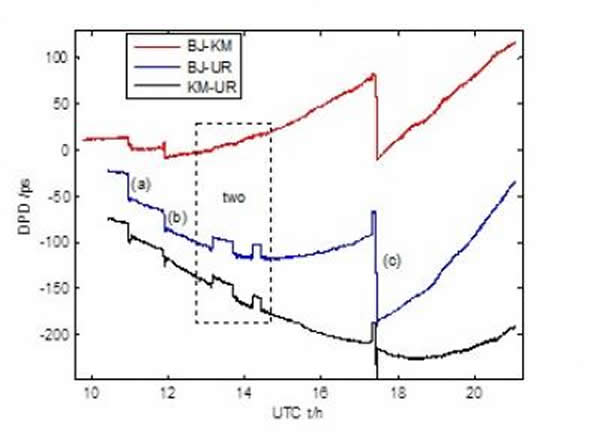
����-����, ����-��³ľ�������-��³ľ����������12��14�Ź۲����ݵIJ����ʱ��(DPD)
����-����, ����-��³ľ�������-��³ľ����������12��15�Ź۲����ݵIJ����ʱ��
��֩������������EurekAlert!�����һ���о�����ͬ����VLBI��������IJ����ʱ�����϶���������������������Ĺ����гɹ������������˶�, ��������50�C100 mm֮��, �������Զ�������������Զ�λ��
��ƪ��Ϊ������ͬ����VLBI�����ʱ�ӵ�'����'���������ӷ��������о����ķ����ڡ��й���ѧ: ����ѧ ��ѧ ����ѧ��2014���8�ڡ� ���й���ѧԺ�Ϻ�����̨������о�Ա��֣�β�ʿ������ͨ������д��
�϶�������2013��12��14�ճɹ���������½. ��½һ��ʱ���, ��ʼ����������������Ĺ��̡���������������½��������������������ź�. ����ͬ����VLBI����, ��ȡ����̽�����ź��м�Ƶ�����λ, ���㺬����ģ���ȵIJ����ʱ�ӡ� ������½�������汣�ֲ���, �����ʱ�ӵı仯��Ҫ��ӳ�����Ķ�������������������˶���
���о�����֮���������ó��������ȵIJ����ʱ��, �۲���仯, ����������������˶��������ͼ����ͼ�����˲����ʱ�ӱ仯�����������������ʱ, �����ʱ����Ӧ�Ŀ��ٱ����С; ԭ��ת��ʱ, �����ʱ�ӳʻ����ͱ仯; ƽ�ƹ�������������; �̱߳仯ʱ, �����ʱ�ӻζ��仯; ���ζ�ʱ, �����ʱ�����ػζ��� ����������ÿһ���˶�, �䶼����Ӧ�ķ����仯. ��ͬ���߶�ͬһ�������ķ�Ӧ��ͬ�� ����̽�������벻ͬ, Ҳ�ᵼ�²����ʱ�ӱ仯���Ʋ�ͬ��
���о��ɹ����ҹ�̽�����������������������̽�⡢����̽���˫Ŀ����Ŀ�����̽��������Ҳ��������Ҫ���á�
�о��õ��˹�����Ȼ��ѧ����(11273049), ���Ҹ����о���չ�ƻ���Ŀ(2012AA121203); �Ϻ��е����붨λ�ص�ʵ����(3912DZ227330001); �й���ѧԺ���ǿ�ѧ�ص�ʵ����(2013DP173302)����������
��Դ����: ֣��, �����, ���Ǿ�, ��. ����ͬ����VLBI�����ʱ�ӵġ����á����������ӷ���. �й���ѧ: ����ѧ ��ѧ ����ѧ, 2014, 44: 872-878